MArmorF教育开发套件配备了车/工规级硬件,保证小车整体运行稳定性,其中包含车规级GMSL摄像头,16线激光雷达,工业级WIFI路由器,IMU与核心计算平台MIIVII Apex Xavier。在底盘方面,包含了4电机直驱系统,差速转向,底盘防撞,紧急断电等功能。

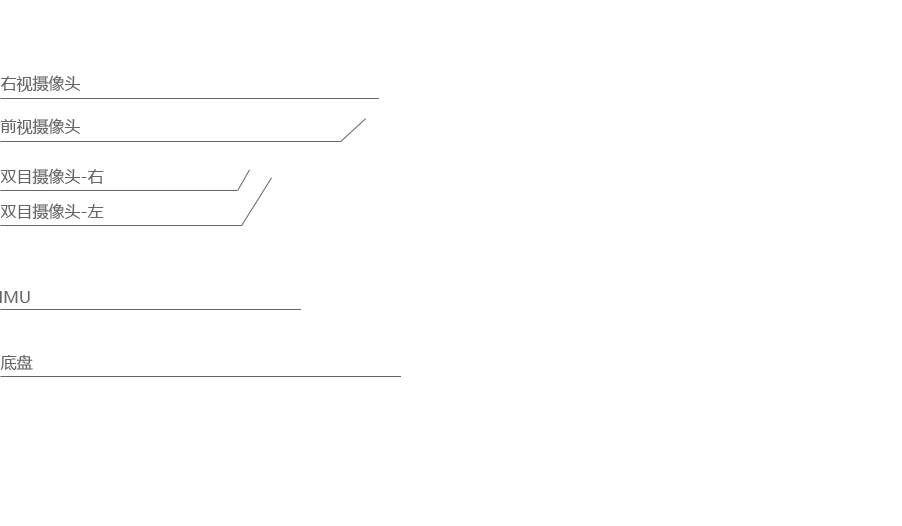
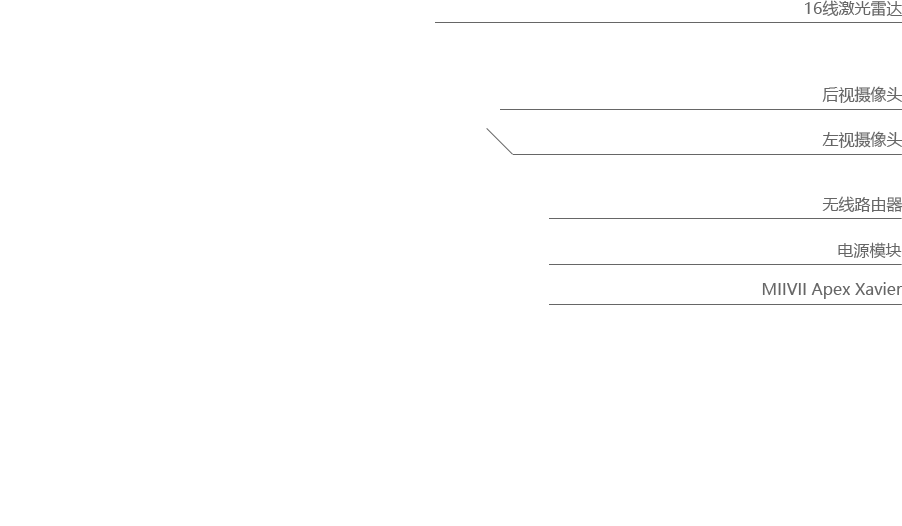
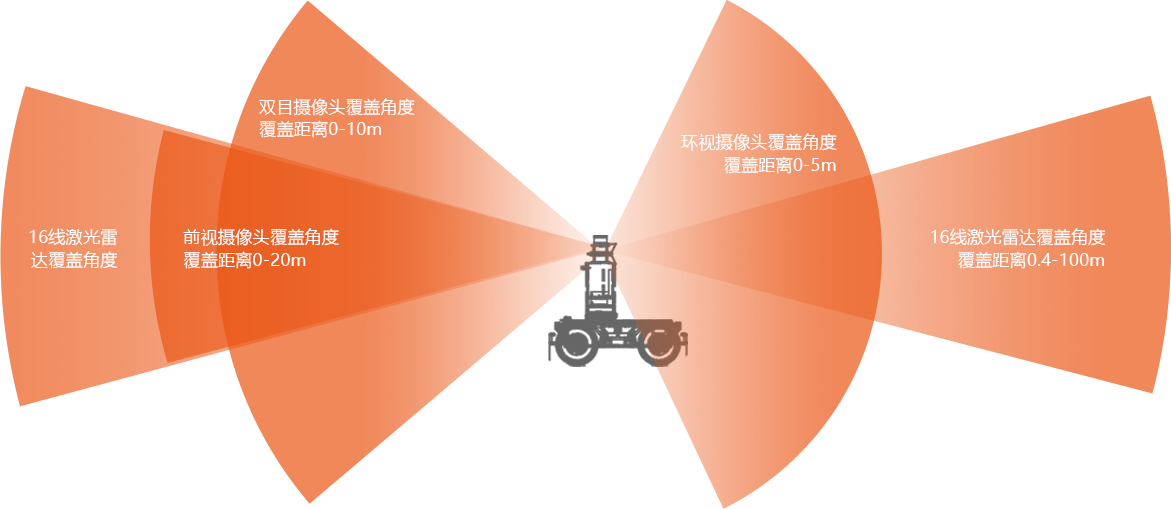
MArmorF教育开发套件传感器覆盖面广,角度全,可选择多重组合。最大支持8路GMSL相机,用户可根据需求组成环视,双目,远视,广角等多重视场角,结合米文融合SDK,与激光雷达数据进行微秒级融合,帮助用户拿到更为精准的数据用于上层算法的开发。







|
||||||||